Bei der am 29. Juli abgeschlossenen ICHIBAN-Mission (japanisch für «Der Erste») kommunizierten und kooperierten erstmals zwei separat entwickelte Astronauten-Assistenzroboter über zwei verschiedene IT-Netzwerke miteinander. Die Zusammenarbeit zwischen den beiden unterschiedlichen freifliegenden Robotersystemen eröffnet den Raumfahrtagenturen neue Möglichkeiten, die Arbeit der Astronauten durch Robotik und KI zu ergänzen und zu verbessern. So können die Agenturen und Systeme jetzt zusammenarbeiten, um ISS-Experimente zu beschleunigen, die ISS auf Mängel zu untersuchen und die Sicherheit der Astronauten zu verbessern.
Eröffnet neue Möglichkeiten
IBM ist seit vielen Jahrzehnten ein wichtiger Technologiepartner der Raumfahrtindustrie, von den Apollo-Mondmissionen bis hin zu Innovationen an Bord der Internationalen Raumstation. Die ICHIBAN-Mission stellt den nächsten entscheidenden Schritt dar: die Kombination von künstlicher Intelligenz und Robotik zur Verbesserung der Fähigkeiten und der Sicherheit der Astronauten. Dabei wurden die beiden Roboter – Int-Ball2 der JAXA und der CIMON des DLR – wurden ursprünglich nicht für diese Aufgaben konzipiert. Die beteiligten Teams entwickelten neue, KI-gestützte Erweiterungen, um beide Roboter sicher zu verbinden.
Schweizer Begleitung
CIMON wurde im Auftrag der Deutschen Raumfahrtagentur am DLR von Airbus und mit Unterstützung von IBM als autonomer Assistenzroboter für Astronauten auf der ISS entwickelt. Mithilfe der Verarbeitung natürlicher Sprache und der Bilderkennungstechnologie kann CIMON über Sprachbefehle mit der Besatzung interagieren und seine Umgebung visuell und akustisch wahrnehmen. Für die ICHIBAN-Mission wurden die CIMON-Integration, die Einsatzplanung und -durchführung mit Unterstützung der Europäischen Weltraumorganisation (ESA) und von BIOTESC, dem zuständigen Missionszentrum mit Sitz in der Schweiz, realisiert. BIOTESC ist als das schweizerische User Support and Operations Center der ESA verantwortlich für die Planung, das Testen und die Umsetzung von Einsätzen von CIMON auf der ISS. Das BIOTESC-Team hat die ICHIBAN Mission von Anfang an begleitet. Während der Operations auf der ISS haben BIOTESC Mitarbeiter sowohl die beteiligten Astronauten als auch CIMON aus dem Kontrollraum in der Schweiz unterstützt. BIOTESC ist an der Hochschule Luzern angesiedelt.
Ziele der Mission
Zu den Zielen der ICHIBAN-Mission gehörten die Demonstration und fortschrittliche Kommunikations- und Aktionsfähigkeiten mehrerer verschiedener Roboter, die in Echtzeit an Bord der ISS arbeiten und die Vorstellung der ersten bidirektionalen Kommunikation zwischen Hardwaresystemen in verschiedenen Modulnetzen auf der ISS. Zudem sollte das die Öffentlichkeitsarbeit gefördert werden, um die Bedeutung der internationalen Zusammenarbeit bei der Förderung der bemannten Raumfahrt hervorzuheben.
Verstecken spielen
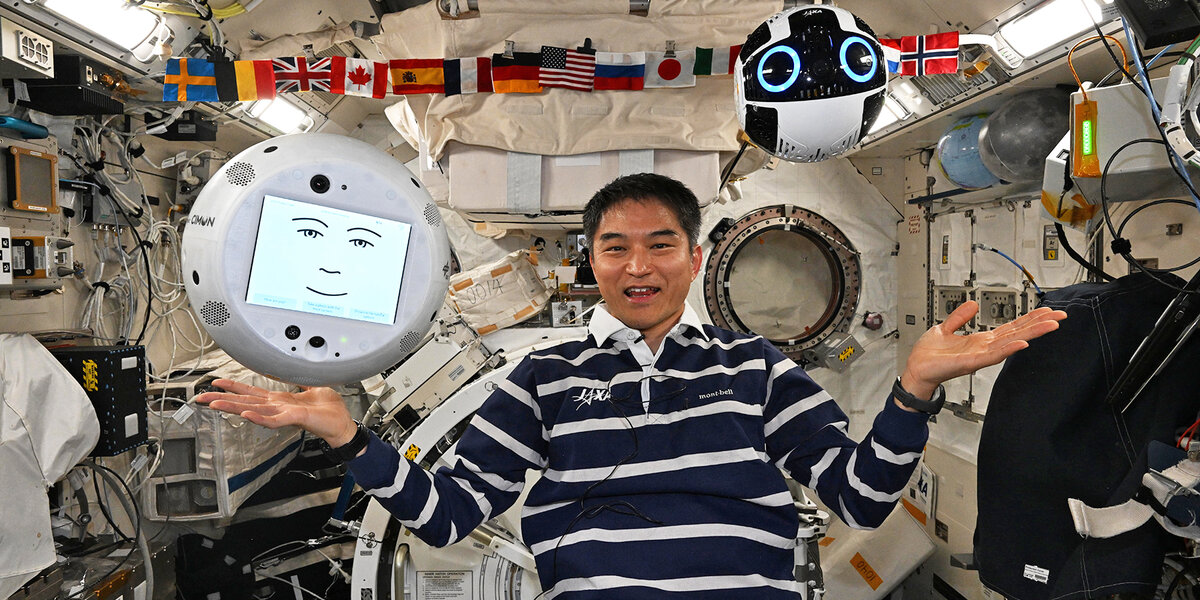
Um diese Ziele zu erreichen, gab der JAXA-Astronaut Takuya Onishi über CIMON Sprachbefehle zur Fernsteuerung der JAXA-Kameradrohne Int-Ball2, das sich in einem separaten ISS-Modul befand. Int-Ball2 übertrug Bilder auf den CIMON-Monitor, so dass Onishi erfolgreich nach Gegenständen suchen konnte, die irgendwo auf der Station versteckt waren. Bis dahin konnten die Fotos von Int-Ball2 nur an die japanische Kontrollstation auf der Erde übermittelt werden, nicht aber an den Roboter einer anderen Agentur auf der ISS. Zu den versteckten Gegenständen gehörten ein Rubik's Cube, ein Hammer, Schraubendreher sowie eine ältere, ausgemusterte Version von Int-Ball.
Zusammenarbeit zwischen Astronaut und Roboter
Für das Experiment hat IBM neue Dialogfunktionen für CIMON entwickelt, die auf der watsonx-Technologie basieren und über ein drahtloses Update bereitgestellt wurden. Mit diesen neuen Funktionen ist vorgesehen, dass die ISS-Astronauten Int-Ball2 im japanischen Kibo-Modul über Sprachbefehle an CIMON steuern können. Das Robot Operation System (ROS) von CIMON ist so konzipiert, dass es diese Befehle erkennt und sie, wenn möglich, über die ISS-Netzwerke an Int-Ball2 übermittelt. Int-Ball2 wird dann programmiert, um die Befehle im Kibo-Modul auszuführen. Dieser Meilenstein unterstreicht das immense Potenzial für künftige Missionen, bei denen Astronauten und mehrere Roboter auf integrierte und intuitive Weise zusammenarbeiten und so die menschlichen Fähigkeiten in schwierigen Weltraumumgebungen verbessern. Weitere Versuche zur Erforschung neuer Anwendungen sind bereits in Planung. Das Experiment wurde in Übereinstimmung mit den geltenden ISS-Sicherheitsstandards durchgeführt.